4/15 の小学生向けプログラミング 教室「るびつく」ビジュアルマスターコース・アドバンス(三鷹)
は、micro:bitで動かすロボットカー micro:Maqueenでライントレースの2回目です。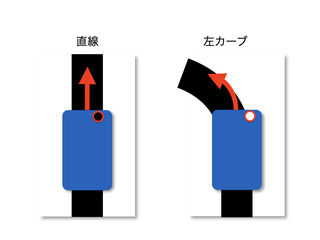
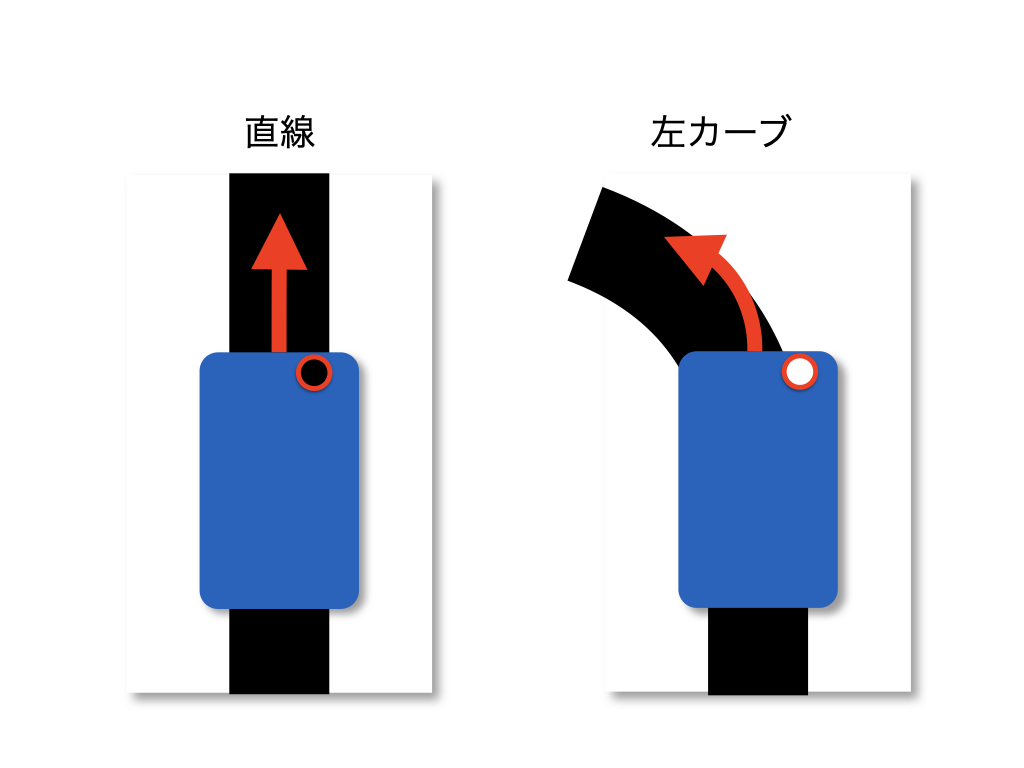
前回は、「まっすぐ」、「左カーブ」だけで走らせていました。「右カーブ」がないので、コースアウトしやすかったです。
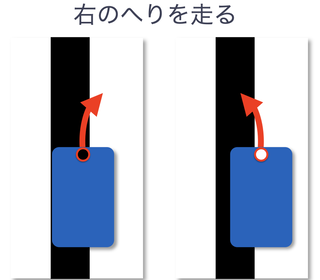
今回はラインのへりを走らせるようにします(エッジ走行)。
これで、いろいろなカーブでも走ってくれるようになるはず!
プログラムの改造は簡単ですね。
さらに、スピードアップに挑戦‼️
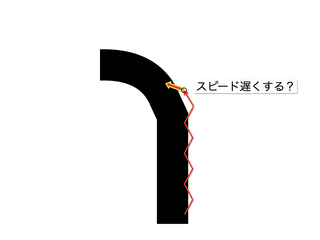
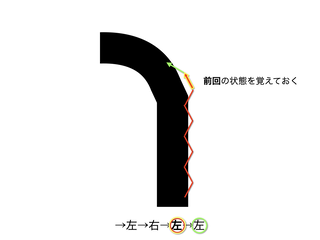
1番のポイントは曲がりきれなかったときの対応です。
→右→左→右→左→右
と走行していれば安定しています。
スピードを速くしてはどうでしょう?
これが、
→右→左→右→左→左
と左が連続するなら、カーブで曲がりきれていないことになります。
スピードを遅くしてはどうでしょう?
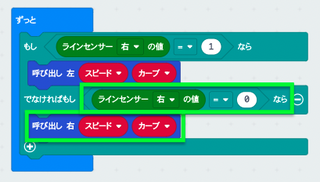
それには、「前回の走行状態(右だったか、左だったか)を覚えておいて、それに基づいてスピードを変える」という考えで走らせてみることにしました。
プログラムの一部がこちら↓
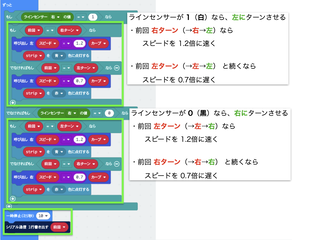
ちょっと難しい走らせ方になったのですが、みんななんとかプログラムを改造して走らせていました。
ちょっとは速く走るようになったかな?
は、micro:bitで動かすロボットカー micro:Maqueenでライントレースの2回目です。
前回は、「まっすぐ」、「左カーブ」だけで走らせていました。「右カーブ」がないので、コースアウトしやすかったです。

今回はラインのへりを走らせるようにします(エッジ走行)。

これで、いろいろなカーブでも走ってくれるようになるはず!
プログラムの改造は簡単ですね。
さらに、スピードアップに挑戦‼️
1番のポイントは曲がりきれなかったときの対応です。
→右→左→右→左→右
と走行していれば安定しています。
スピードを速くしてはどうでしょう?
これが、
→右→左→右→左→左
と左が連続するなら、カーブで曲がりきれていないことになります。
スピードを遅くしてはどうでしょう?

それには、「前回の走行状態(右だったか、左だったか)を覚えておいて、それに基づいてスピードを変える」という考えで走らせてみることにしました。

プログラムの一部がこちら↓

ちょっと難しい走らせ方になったのですが、みんななんとかプログラムを改造して走らせていました。
ちょっとは速く走るようになったかな?

